Projekt aktuell
Anfang der Blog-Phase
18.09.2017
Da so langsam die gemeinsamen Arbeiten an unserem Projekt weniger werden und jeder spezifische Aufgaben hat endet heute die "gemeinsame" Blog-Phase. Ab heute wird jeder von uns seinen eigenen Blog starten und euch so Einblicke in die verschiedenen Arbeiten ermöglichen.
Ein neuer Roboter entsteht
11.09.2017
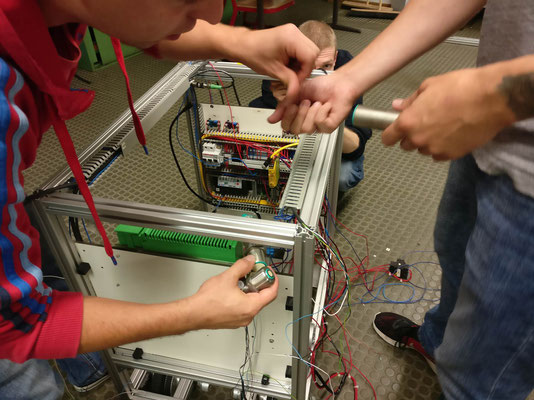
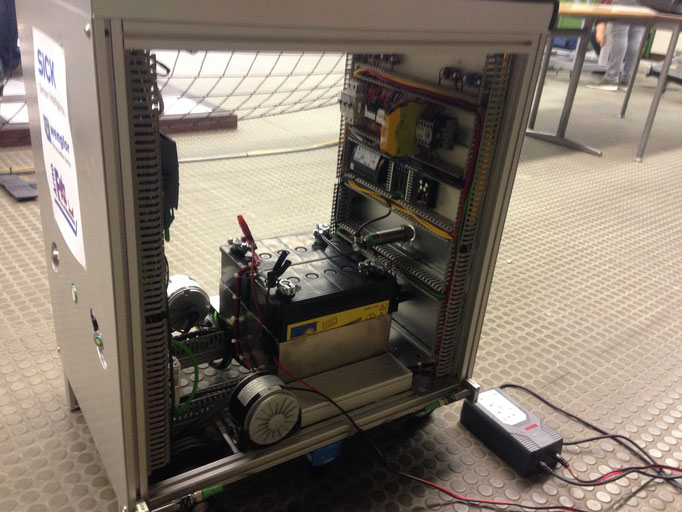
Nach dem Zerlegen folgt der erste Montag an dem aus den Einzelteilen langsam wieder etwas entsteht. Die Antriebsräder wurden nach außen gesetzt, die freidrehende Rolle angepasst und die Aufteilung im Innern des Roboters vorgenommen.
Außerdem wurden gemäß unserer vorherigen Festlegung die Sensoren angebracht.

Endgültige Festlegung der Sensorposition
04.09.2017
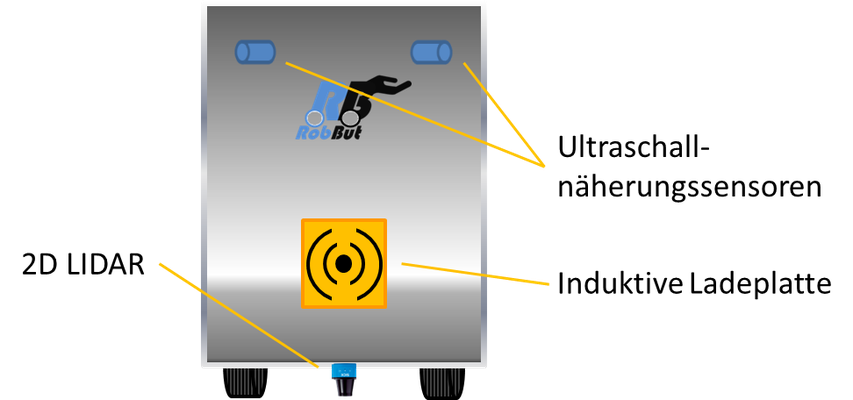
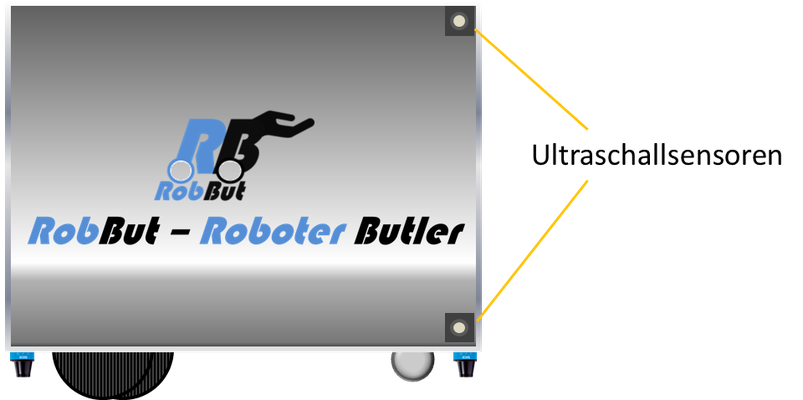
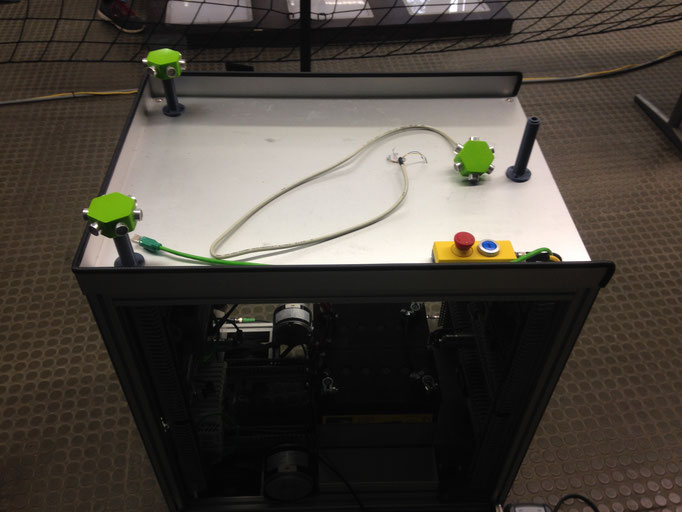
Am heutigen Tag haben wir die verschiedenen Sensorpositionen besprochen und die Vor- und Nachteile gegenübergestellt. Aus diesem Meeting gingen die angefügten Bilder hervor, die die endgültigen Positionen zeigen. Um die "blinden Stellen" des Roboters abzusichern wird momentan geprüft, ob es Sinn macht eine Art Bumper als letzte Absicherung einzusetzen.
Erste Sensor Inbetriebnahme
30.08.2017
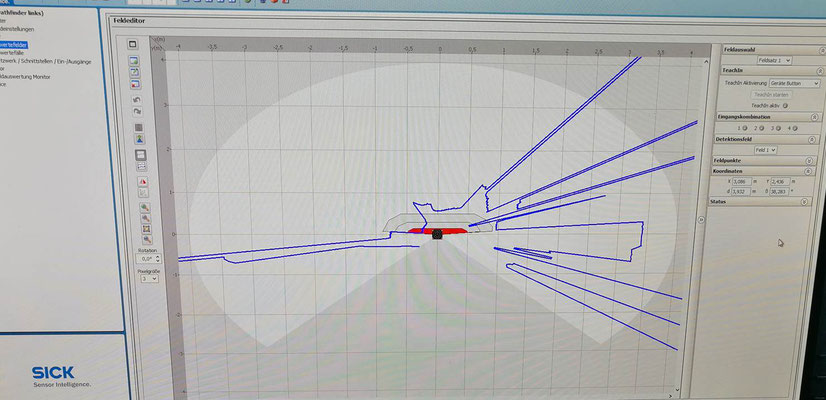
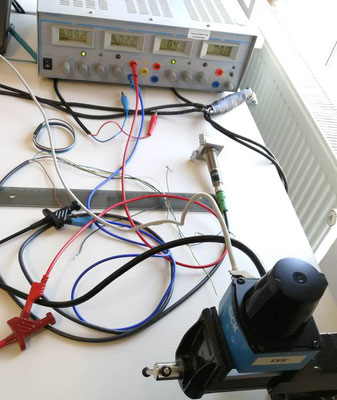
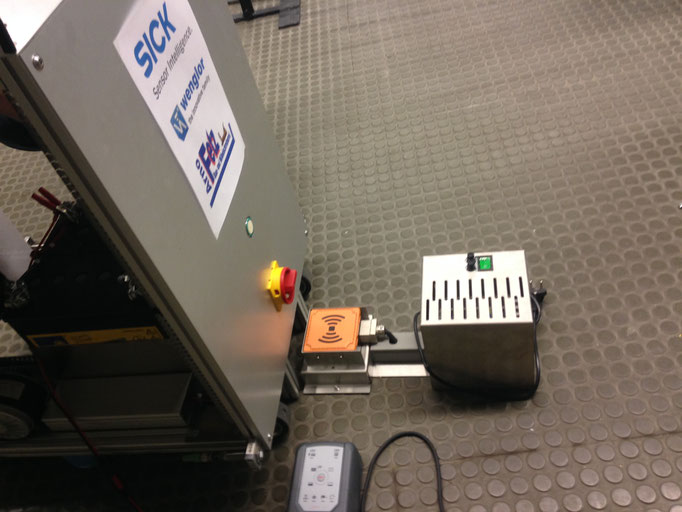
Unser erster Sensor wurde versuchsweise in Betrieb genommen um ein bisschen Reverse Engineering zu betreiben.
Das LIDAR TIM32 von Sick lässt sich wirklich einfach in der GUI konfigurieren und parametrieren.
Weiter Zerlegen...
28.08.2017
Am heutigen Montag Abend haben wir entgegen der eigentlichen Planung den bestehenden Rest des Roboters komplett zerlegt. Durch das Versetzen der wichtigsten Sensoren war diese Maßnahme unumgänglich. Wie es so ist zieht das Eine das Andere nach sich...
Auf jeden Fall sind die Sensorpositionen für den ersten Schuss mittlerweile festgelegt:





Es geht los!
21.08.2017
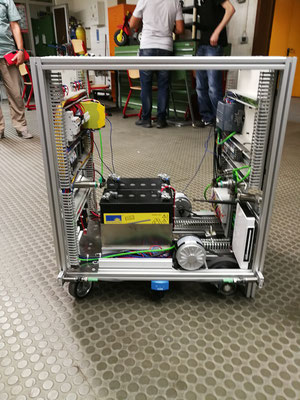
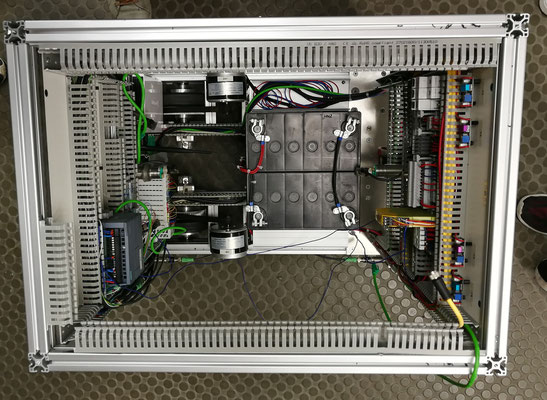
Heute hatten wir das Kickoff für unsere Projektarbeit. Es wurden uns die wichtigsten Termine genannt und die Räume soweit eingeteilt. Danach ging es sofort zur Sache, unser Arbeitsbereich wurde eingerichtet und wir haben mit der Zerlegung unseres Roboters begonnen. Vorher wurde natürlich die Bestandsaufnahme gemacht, schließlich müssen wir in naher Zukunft definieren was angeschafft werden muss. Zum Abschluss noch ein paar Bilder zur Veranschaulichung:
Vorher:



Nachher: