11.12 und 18.12.2017
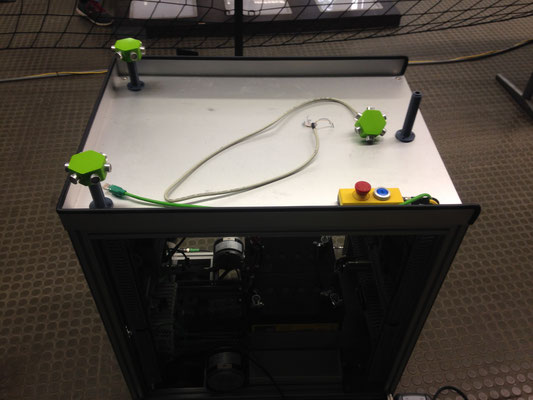
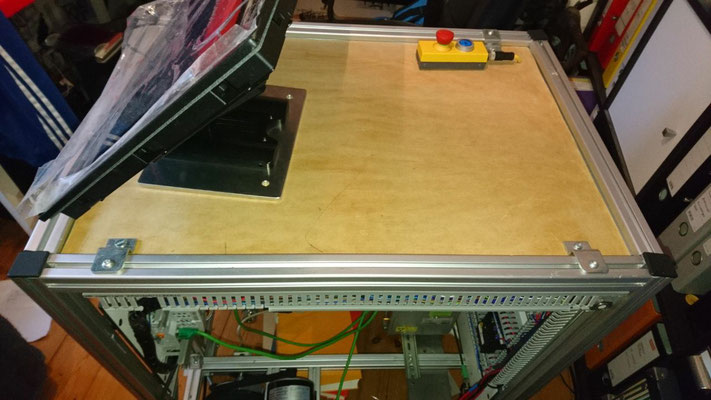
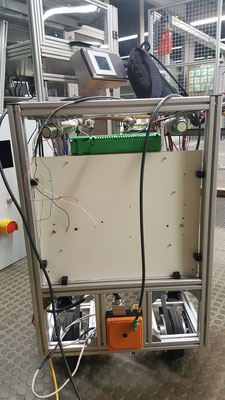
Verkleidung oben und Befestigung des Touch-Panels und Not-Aus-Schalter
Ich habe oben in das Item-Profil eine Holzplatte eingebaut damit sie das Gewicht des Touch-Panels halten kann und zur Ablage der Transport Teilen dient. Diese Platte habe ich aus Holz zurechtgeschnitten und mit Halter am Item-Profil befestigt. Musste noch Zwei Löcher bohren damit die benötigen Kabel durchgeführt werden können. Dann habe ich den Not-Aus-Schalter oben auf die Holzplatte befestigt. Außerdem habe ich dann noch einen Touch-Panel-Halter auf die Holzplatte montiert und darauf das Panel befestigt.
20.11 bis 24.11.2017
Bau der Anfahrbaren Ladestation.
Diese Tagge haben ich damit verbracht eine Neue Ladestation zu bauen, die der Robbut auch anfahren kann. Habe das Grundgestell aus Item Profil zusammengebaut. Die induktiven Ladeplatte wurde Vorne befestigt dazu der Sender der Infrarot Leuchtfeuer. Das Netzteil Innen am Item-Profil befestigt. Außen werden noch Verkleidungen mit Belüftung und Schalter montiert.


06.11 und 13.11.2017
Infrarot Leuchtfeuer
An diesen zwei Tagen habe ich mich damit beschäftigt die Infrarot Leuchtfeuer von Herr Wenzel Zusammenzubauen. Dazu wurde ein Gehäuse benötigt. Dieses wurde aus zwei Plastikteilen gefertigt und die Empfänger darin befestigt. Außerdem wurde am Gehäuse gleich ein Loch zur Befestigung am Robbut gelassen. Somit haben ich sie nach Montage auch sofort am Robbut montiert und ausgerichtet.


25.09.2017
Anfertigung der Befestigung der induktiven Ladeplatte.
Die induktive Ladeplatte wollen wir von Unten nach vorne versetzen. Dazu müsste erstmal eine Vorrichtung gebaut werden um den Adapter zu befestigen. Dies habe ich aus ITEM- Profilen zusammengebaut und denn Adapter daran befestigt.




18.09.2017
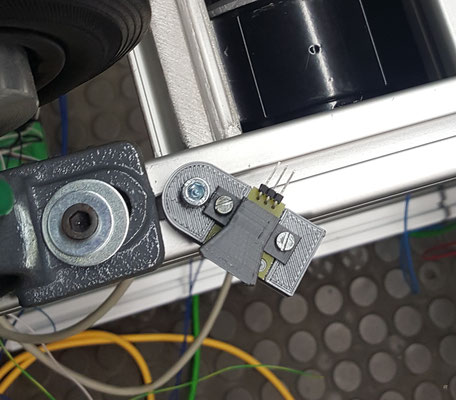
Umbau der Sensoren und LIDARs
Heute habe ich die 8 Sensoren und 2 LIDARs umgebaut. Dazu musste ich die Komponentenbefestigungsplatten lösen und nach unten Schieben. So das jeweils zwei Sensoren pro Seite im oberen Bereich angebracht werden können. Hierzu musste ich die Halter der Sensoren ändern.
Auf der Seiten wo der RobBut ausschwängt, haben ich oben und unten jeweils einen Sensor seitlich angebracht.
Somit haben wir 8 Sensoren verbaut die den oberen Bereich wie die Seiten abdecken.
Für den unteren Bereich haben wir 2 LIDARs verwendet. Diese habe ich vorne und hinten in der Mitte angebracht.
Somit Decken wir denn unteren Bereich ab.


11.09.2017
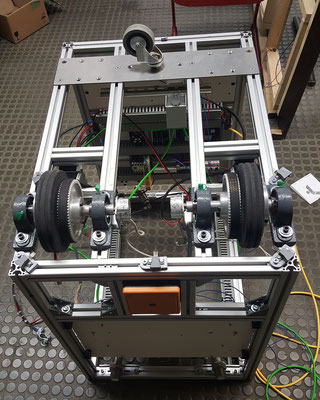
Umbau der Räder
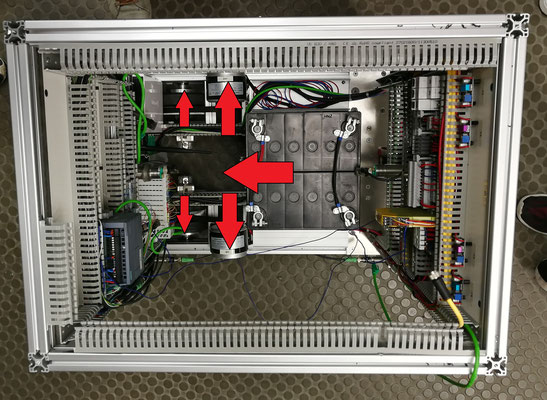
Heute habe ich mit dem Umbau Begonnen. Die beiden Antriebsräder wurden weiter auseinander gesetzt damit wir die Batterien nach hinten setzen können um somit das Gewicht zu verlagern.
Die Zwei Räder hinten zum Lenken habe ich durch ein Rad in der Mitte ersetzt, damit wir weniger Radwiderstand haben. Dazu müsste die Befestigungsplatte der Räder nach unten angebracht werden und ein neues Loch in der Mitte gebohrt werden für die Befestigung des neuen Rad.

28.08.2017
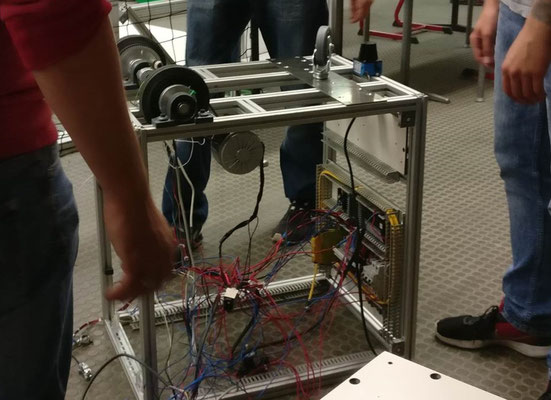
Planung Neuaufbau und Ausbau der Alten Komponenten
Heute haben wir mit der Planung des RobBut begonnen.
Ich habe die alte Komponente vom Ultraschall ausgebaut da sie nicht mehr benötigt werden.
Außerdem hab ich die Außenverkleidung abmontiert damit wir genug Platz zum Umbau haben und ich neue Außenverkleidungen Herstellen muss da sich alles ändert.