Blog Christian
01.12.2017
Halter IR Sensoren
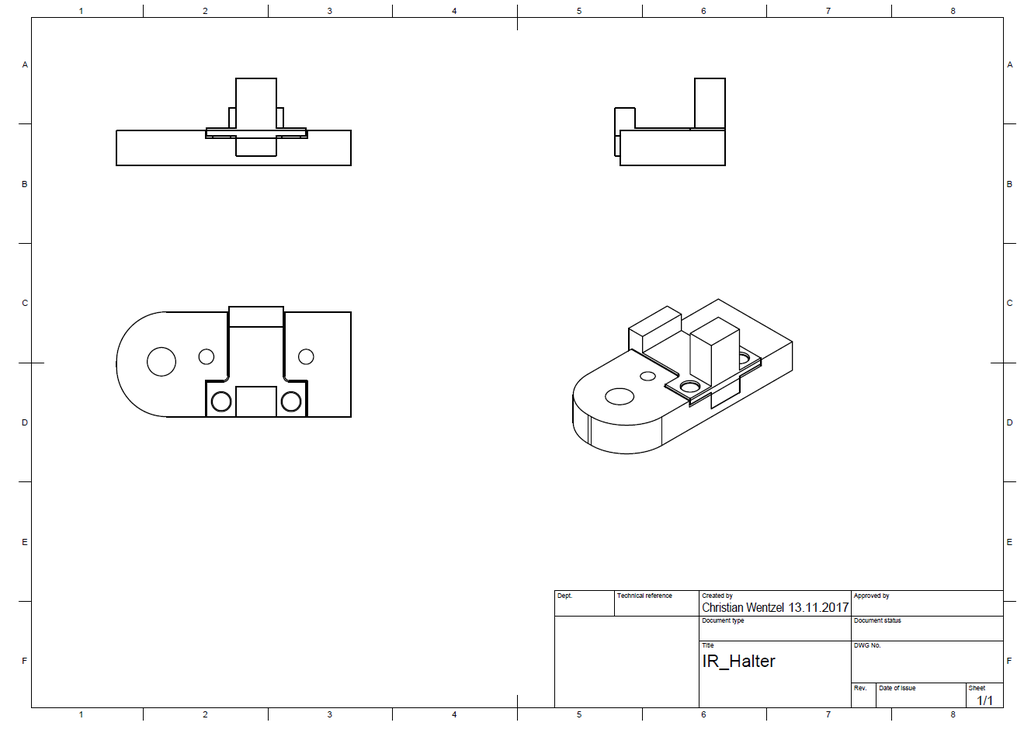
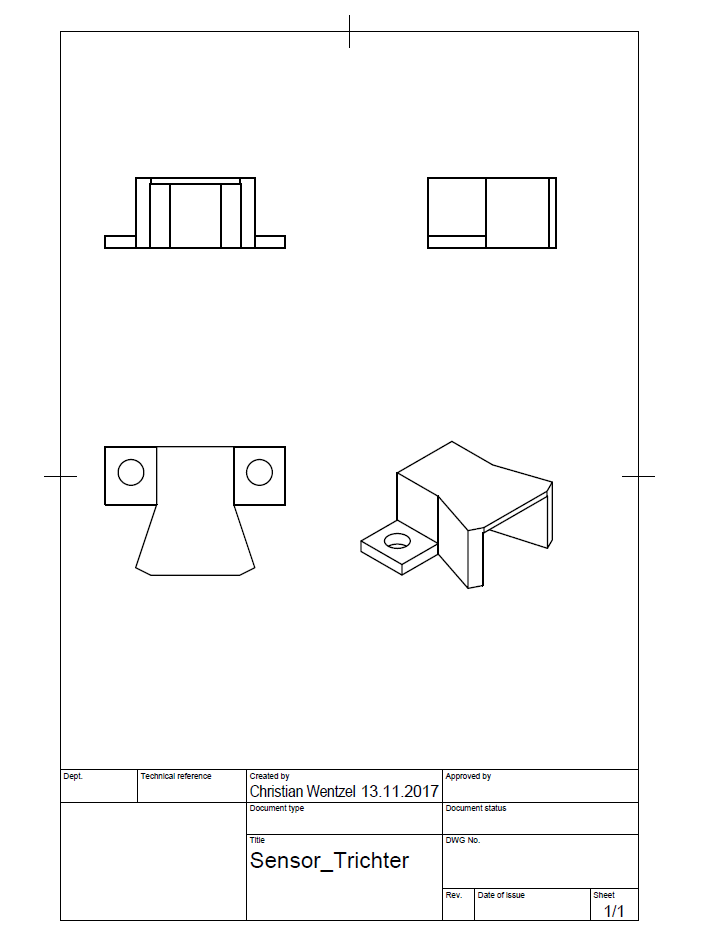
Für die IR Sensoren wurden noch Halter notwendig um sie an den Aluprofilen der Roboters befestigen zu können. In diesem Zuge wurden direkt Trichter designt die Sensoren gegeneinander abschotten.
Diese Halterung wurden mit Autodesk Fusion 360 erstellt und auf einem 3D Drucker mit PLA Filament gedruckt.
Die nebenstehenden Bilder zeigen die jeweils endgültige Version. Es wurden insgesamt drei verschiedene Designs angefertigt und probe gedruckt.
Insgesamt wurden 5 Sensoren bestückt, Um ein Ersatzteil zu haben wurden 6 Sätze angefertigt.
10.10.2017
Inbetriebnahme
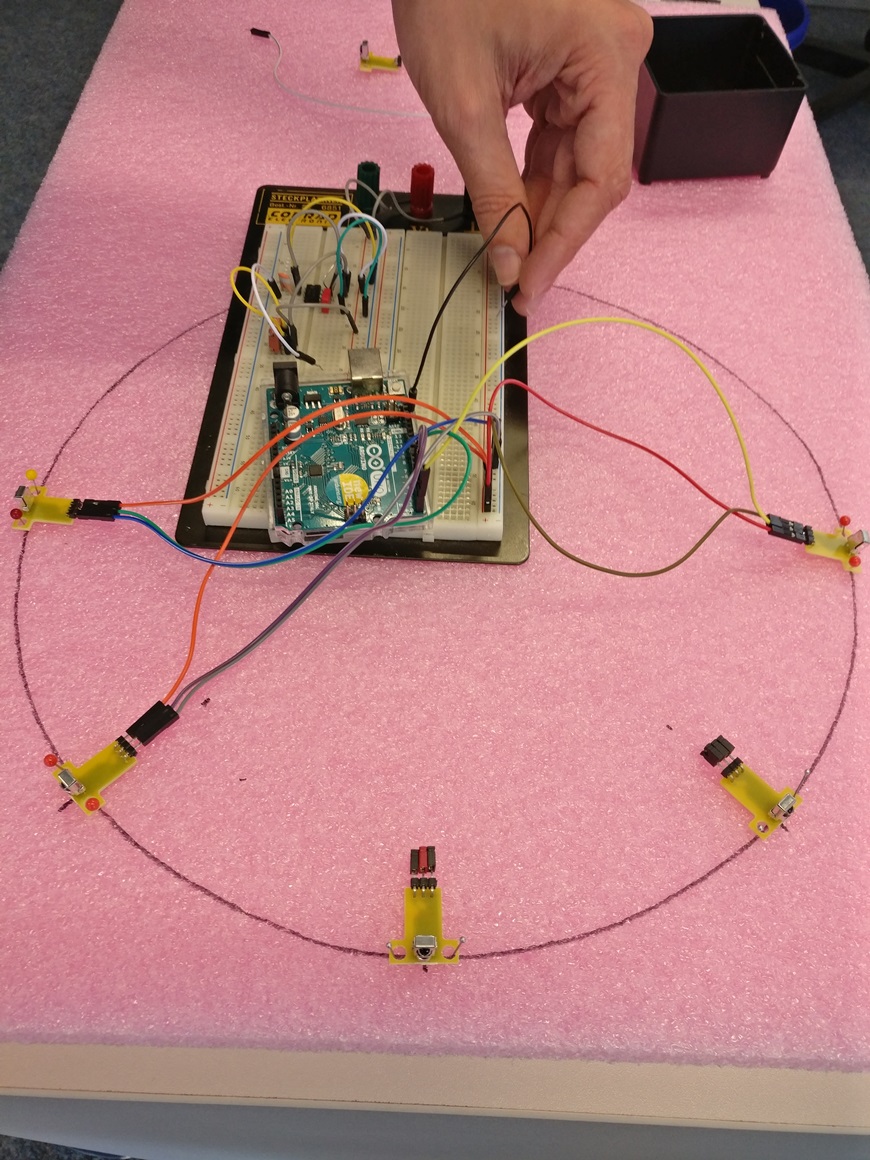
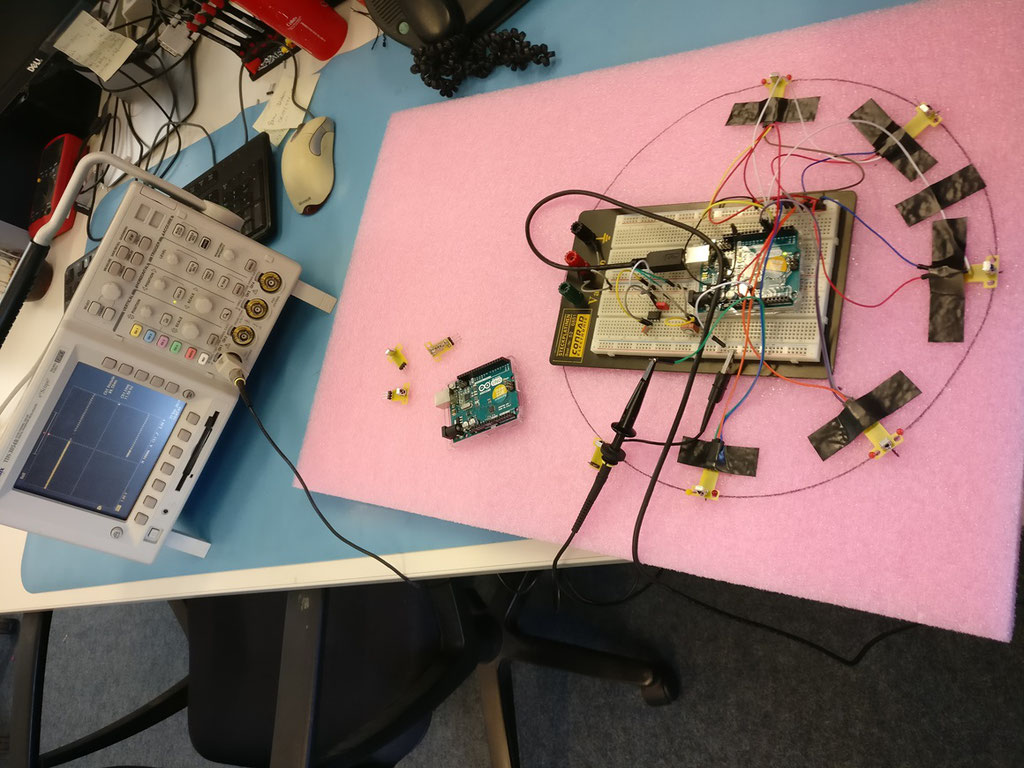
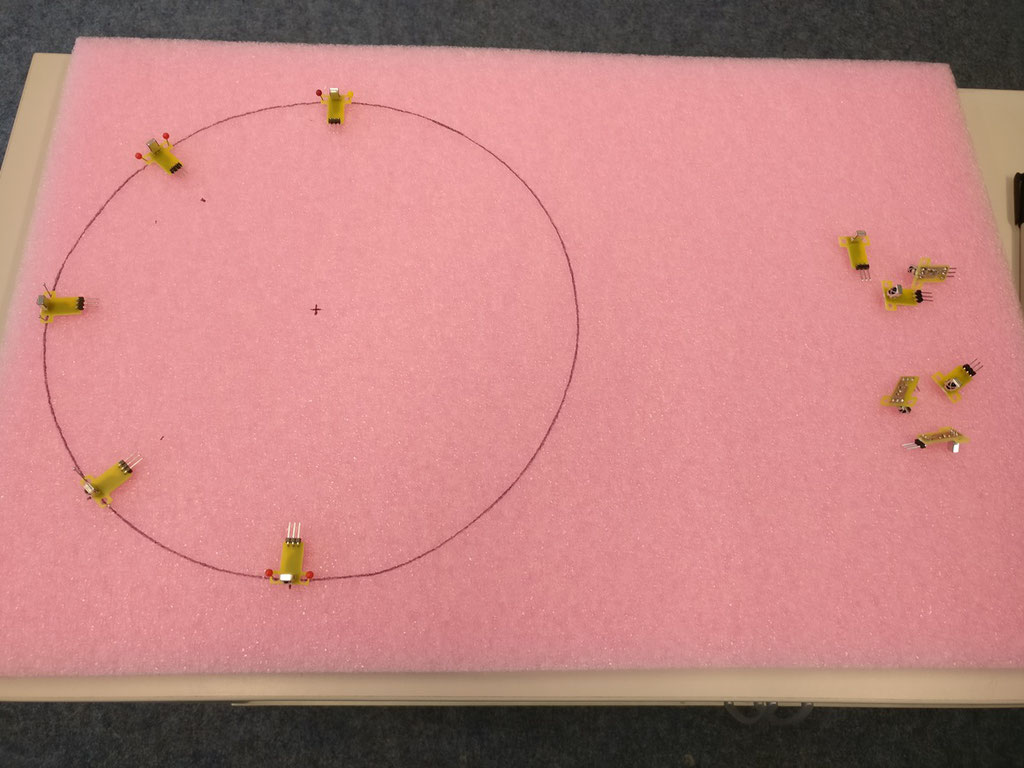
Heute folgte die Inbetriebnahme der bestückten PCBs. Dazu wurden die Empfänger Kreisförmig auf einer Unterlage platziert um die Ausrichtung auf dem Roboter zu simulieren.
Mit einem Arduino sollen die Eingänge überwacht werden und mittels digitaler hardwired Schnittstelle an die SPS übergeben werden.
Um die Ausgabe der Sensoren zu überprüfen wurde ein Oszilloskop genutzt. Als der Sender eingeschaltet wurde, konnte man an jedem IR Sensor das Signal erkennen.
Ich vermutete zuerst einen Fehler, als das Oszilloskop das gepulste Signal anzeigte, egal in welche Richtung man den Sender hielt. Schnell wurde mir aber klar, dass die LED viel zu viel Strahlungsleistung abgab und die Reflektionen im Raum ausreichten um jeden Sensor anzusprechen. Da sich der Lichtstrom / die Strahlungsleistung zum LED Strom linear verhält wurde der LED Strom in 2 Stufen jeweils um den Faktor 10 nach unten korrigiert. Schlussendlich wird die LED jetzt anstatt mit 1000mA mit 10mA bestromt. Das sieht bis jetzt im Laborversuch recht brauchbar aus.
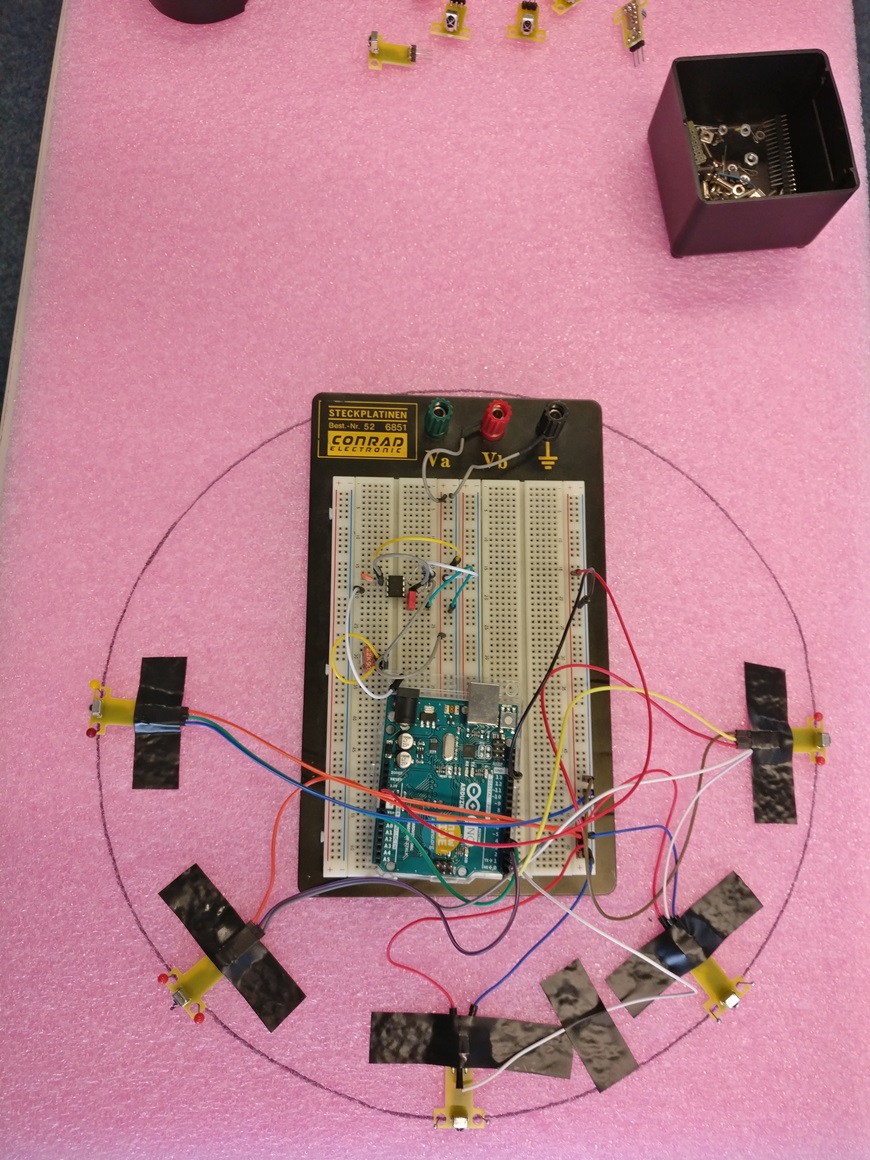
Leider gelang trotz allem die Trennung der verschiedenen Richtungen nicht wirklich, Wahrscheinlich werden Gehäuse nötig, die die Empfänger voneinander abschatten und gegebenenfalls den Abstrahlwinkel des gesendeten Signals einschränken.
25.09.2017
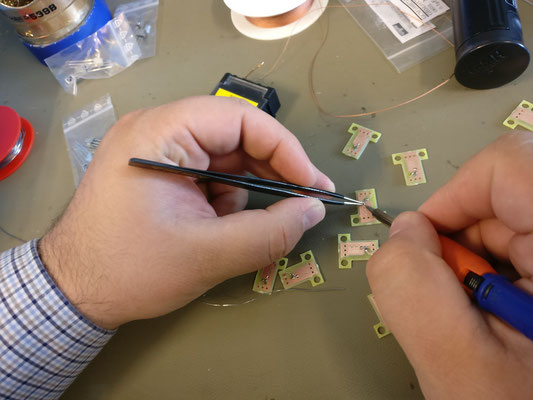
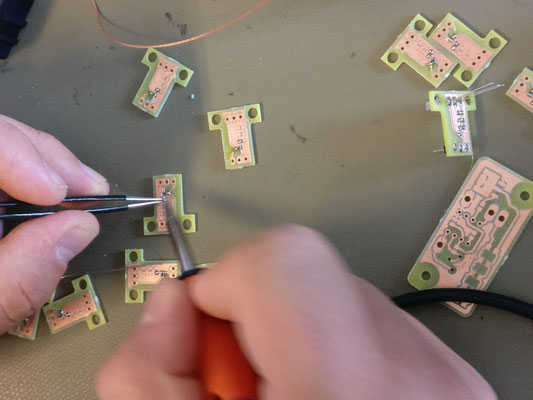
Fräsen und Löten
Der Schaltplan und das Leiterplattenlayout wurden mithilfe von EAGLE erstellt und auf einen einseitigen Kupfer-Nutzen mit Hilfe eines Fräsbohrplotters gefräst.
Nachdem die PCBs gefräst wurden, habe ich diese bestückt und auf Fehler getestet. Aufgrund der verwendeten kleinen SMD Bauformen musste ich vor der Inbetriebnahme einzelne Kurzschlüsse beheben.
18.09.2017
Schaltplan und Layout Phase
Um das automatische Anfahren der Ladestation zu realisieren fehlt es an einer Navigationsmöglichkeit.
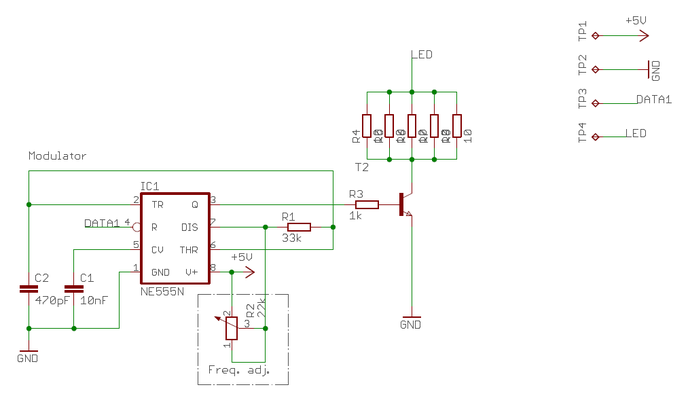
Um dem Roboter zu ermöglichen diesen Punkt zu finden wird ein Infrarot Leuchtfeuer aufgebaut. Das besteht aus einem Sender, der ein auf 38kHz moduliertes Signal ausgibt.
Die LED die verwendet wird ist eine OSRAM OSLON SFH4726s mit 940nm Wellenlänge:
Diese LED wird über über einen Vorwiderstand mit 1A bestromt. Die resultierende Leistung ist mit 3,4 Watt und 990 mW Strahlungsleistung recht hoch und sollte somit auch für große Räume ausreichend sein.
Als Empfänger kommen handelsübliche OS-1838B Bausteine zum Einsatz. Diese sind sehr günstig und beinhalten bereits den Photodetektor und Vorverstärker-IC in einem Gehäuse mit IR-Filter. Die Empfänger sind auf 940nm Wellenlänge und 38kHz Modulation hin optimiert.