Wer schreibt, der bleibt...
12.01.2018
Die Dokumentation wird aktuell mit Hochdruck auf die Abgabe Form gebracht. Der Abgabetermin rückt immer näher.
06.01.2018
Der RobBut nimmt Form an
Weiter geht's

Die Anbauteile sind mittlerweile alle da und wurden angeschlossen. Der RobBut ist in der schulfreien Zeit nach Oberheimbach gezogen. Hier wird am Programm gebastelt. Die Grundfunktionen stehen und die Verbindung zum Industrie-PC über Modbus TCP wurde getestet. In den nächsten Tagen wird weiter programmiert. Außerdem wird mit Hochdruck an der Dokumentation gearbeitet, da der Abgabetermin näher rückt.
27.11.2017
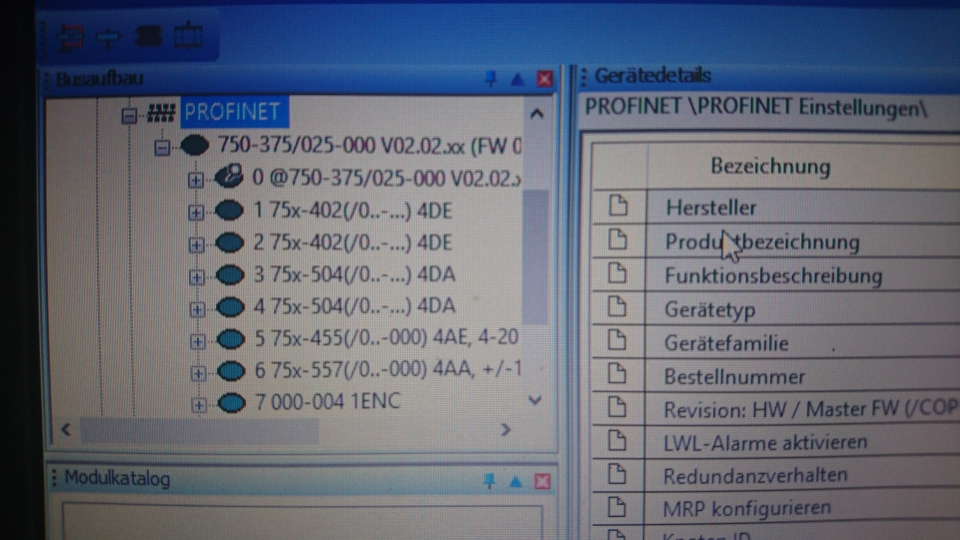
Das Fundament steht
Der Busaufbau wurde erfolgreich angelegt und die Variablen sind angelegt. Diese wurden heute auch im Debug Modus der SPS getestet. Das bedeutet, dass unser RobBut das erste Mal zum Leben erweckt wurde. Jetzt steht dem Programmentwurf nichts mehr im Weg.
20.11.2017

Es war eine Zeit lang still im Blog, aber im Hintergrund wurde weiter gewerkelt. Aktuell wurde der Busaufbau eingelesen und die ersten Variablen erzeugt. Jetzt fängt die Phase der Programmierung an. Es wartet noch viel Arbeit...
Alles nach "Plan"
16.10.2017
Geschuldet durch die Herbstferien war es etwas ruhig im Blog. Leider sind die bestellten Teile immer noch nicht angekommen. Somit verschiebt sich der Abschluss der Hardwarearbeiten. Die Zeit ohne Schule habe ich genutzt um die Schaltpläne auf Vordermann zu bringen und zu ergänzen. Leider waren die Pläne der Vorgänger nicht sehr sauber ausgearbeitet, wodurch alle Pläne neu gezeichnet werden mussten. Als nächstes steht die Einarbeitung in die Programmiersprache Strukturierter Text an.
Aufbau schreitet voran
18.09.2017
Nachdem die Eckdaten des Aufbaus stehen, können die Arbeiten am Aufbau weitergehen. Meine Aufgabe umfasst die Planung und Verdrahtung der Steuerung. Durch die Teilnahme am Xplore Award muss die Steuerung auf eine Phoenix Contact SPS umgerüstet werden. In diesem Zusammenhang wurden die bestehenden Schaltpläne angepasst und korrigiert. Die neue Steuerung wurde an die Spannungsversorgung angeschlossen. In den nächsten Wochen müssen alle Sensoren angeschlossen und die Ethernet Verbindung hergestellt werden.